What Device Is Electrical Energy To Kinetic Energy?
Electrical energy is a form of energy that relies on the motion of electrons in an electric current to power devices and systems. Kinetic energy is defined as the energy an object possesses due to its motion. Converting between electrical and kinetic energy enables us to power devices and systems that produce movement and mechanical work from electricity. Understanding how to efficiently convert between electrical and mechanical energy is fundamental for powering a wide variety of technologies we rely on every day.
The most common way electrical energy gets converted into kinetic or mechanical energy is through a motor of some kind. Motors take in electricity and convert it into rotational motion or torque. There are several different types of electric motors and linear actuators that can produce linear motion. Each operates on slightly different principles and has its own advantages. This article will provide an overview of the most common technologies for converting electrical energy into kinetic energy and their applications.
Electric Motors
Electric motors convert electrical energy into mechanical energy through electromagnetic induction. Inside an electric motor, there are coils of wire that form electromagnets. When current flows through the coils, it generates a magnetic field that interacts with permanent magnets on the motor’s rotor. This interaction causes the rotor to spin, providing rotational force or torque.
There are several main types of electric motors:
- DC motors use direct current power and have brushes that deliver current to the rotating armature. They are simple and inexpensive but have more maintenance needs.
- AC induction motors use alternating current and have a stationary armature called a stator. The rotor spins when AC current is applied to the stator. They have high reliability but need additional components to start.
- Synchronous motors produce torque by the interaction between magnetic fields of the stator and permanent magnets on the rotor. They are very precise at maintaining speed.
- Stepper motors move in precise increments controlled by electronic pulses. They are used when precise positioning and speed control are needed.
Electric motors have many applications across industries. They are used in factory automation, motors for electric vehicles, pumps, fans, power tools, household appliances, robotics, aircraft and vehicles. Their ability to convert electricity into rotational motion makes electric motors an essential component of many mechanical and electromechanical systems.
Linear Actuators
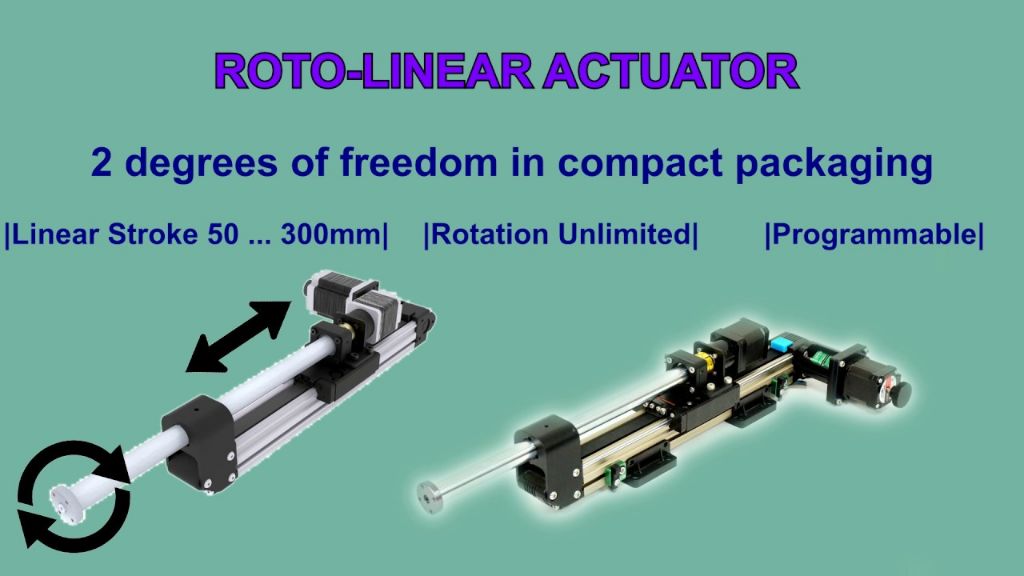
Linear actuators are devices that convert electrical energy into linear mechanical motion. They use an electric motor to provide rotary motion, which is then converted into linear motion via a mechanical transmission system like a lead screw, rack and pinion, or ball screw.
The electric motor spins a lead screw or drive shaft that is connected via nut or gears to a carriage or piston. As the lead screw rotates, the carriage is driven along the axis of the screw in a linear direction. The stroke length depends on the length of the lead screw. Linear actuators can provide high levels of force and precision linear motion control.
Linear actuators are used in a wide range of applications that require linear motion control. These include robotics, precision machining equipment, assembly machinery, valves and regulators, adjustable furniture, and more. The main advantages of linear actuators are their ability to provide controlled bi-directional linear motion, high force output in a compact package, and fast dynamic response compared to other linear motion devices.
Solenoids
Solenoids are another type of electromechanical device that convert electrical energy into linear mechanical motion. They consist of a coil of wire wrapped around a movable ferromagnetic core. When current is applied to the wire coil, a magnetic field is generated which pulls or pushes the core in a linear direction. The core is attached to a shaft which moves back and forth inside the coil.
Solenoids operate based on the principles of electromagnetism. The magnetic field produced by the current flowing through the coil creates a force that acts on the ferromagnetic core. The strength of the magnetic field, and the resulting force, depends on the number of wire loops in the coil, the amount of current, and the magnetic properties of the core material. The motion of the core can be used to exert a linear push or pull force on an external mechanism.
Because of their simple linear motion, solenoids are used in a wide variety of applications:
- Automobile engine starters – The solenoid moves the starter drive gear into mesh with the flywheel ring gear when current is applied.
- Valves – Solenoids are used to open and close valves in fluid and gas systems by pushing or pulling the valve stem.
- Vending machines – Solenoids can trigger the release of soda cans or candy when activated.
- Pinball machines – The spring-loaded plunger that shoots the ball onto the playfield is driven by a solenoid.
- Electronic locks – Solenoids are used to actuate the bolt locking mechanism in electronic door locks.
- Circuit breakers – Solenoids provide the force to open or close the electrical contacts.
- Injection molding – Solenoids open and close the injection nozzle by linear motion.
In summary, solenoids are a key electromechanical component that can generate a controlled linear force from an electrical input. Their simplicity and versatility make them ideal for converting electricity into linear mechanical motion for a wide range of applications.
Piezo Actuators
Piezo actuators utilize the piezoelectric effect to convert electrical energy into mechanical motion. The piezoelectric effect causes certain materials, like crystals and ceramics, to generate an electric charge in response to applied mechanical stress. This effect works in reverse as well – when an electric field is applied to a piezoelectric material, it induces a mechanical deformation or strain.
There are several types of piezo actuators:
- Piezoelectric stack actuators – These are made of multiple layers of piezoelectric material that expand or contract when voltage is applied. The key advantage is high force generation in a compact package.
- Piezo bending actuators – These utilize a piezoelectric material affixed to a passive substrate. Voltage applied causes the piezo material to expand or contract, causing the substrate to bend. These are simple and low cost but have lower force capabilities.
- Piezoelectric tube actuators – These utilize the radial expansion and contraction of a hollow piezoelectric tube to generate linear motion. They have high bandwidth and can achieve large displacements.
Some common applications of piezo actuators include:
- Precise positioning and microscopy
- Injectors and valves
- Vibration control of structures
- Speakers and sound generation
- Atomic force microscopy
Their fast response time, compact size, and large generated forces make them well-suited for ultra-precision motion control applications.
Shape Memory Alloys
Shape memory alloys (SMAs) are a unique class of smart materials that have the ability to return to a predetermined shape upon heating. This shape changing property allows them to convert electrical energy into mechanical work.
SMAs can exist in two different crystal structures or phases – martensite and austenite. Martensite is the lower temperature phase and is easier to deform. Austenite is the higher temperature phase and is the “remembered” shape that the SMA returns to upon heating.
When an SMA in its martensitic state is deformed, it can remember this deformed shape. However, when heated past its transformation temperature, it reverts to its austenitic state and recovers its original, predetermined shape. This process can exert a significant force as the metal undergoes shape recovery.
The most common SMA is an alloy of nickel and titanium called nitinol. Just a few degrees of temperature change can trigger the shape memory effect in nitinol. This allows SMAs to do useful work like actuation, opening and closing valves, and deploying space structures.
The key properties that enable shape memory behavior are the temperature and stress-induced martensitic phase transformations. These make SMAs uniquely capable of converting electrical energy into mechanical energy and motion.
Electroactive Polymers
Electroactive polymers, or EAPs, are materials that change size or shape when stimulated by an electric field. This ability allows them to convert electrical energy into mechanical motion. EAPs come in several varieties with different modes of actuation:
-
Dielectric elastomers – These EAPs consist of an elastomeric film coated with compliant electrodes. When voltage is applied, electrostatic pressure between the electrodes squeezes the elastomer, causing expansion in surface area and contraction in thickness.
-
Electrostrictive graft elastomers – These materials consist of polymer chains grafted with electronic groups that align under an applied electric field. This molecular alignment causes the material to physically contract.
-
Liquid crystal elastomers – Similar to electrostrictive types, these EAPs have rod-like liquid crystal groups grafted onto polymer chains. When stimulated, the crystals rotate and induce strain on the backbone polymer network.
-
Ionic polymer gels – Also called ionic polymer-metal composites (IPMCs), these EAPs contain mobile cations anchored to polymer chains. When a voltage is applied, cations migrate to produce electrostatic forces that bend the material.
The ability of EAPs to produce relatively large strains and deformations with low input voltages makes them useful for artificial muscles, biomimetic robots, and microactuators. Their soft, flexible nature also allows EAPs to mimic natural muscle movement in applications like prosthetic limbs and adaptive optics.
Electromagnets
Electromagnets convert electrical energy into kinetic energy through the interaction of magnetic fields and electric currents. They consist of a coil of wire wrapped around a ferromagnetic core, such as iron. When electric current passes through the coil, it generates a magnetic field. The magnetic field’s strength depends on the number of coil turns and the current flowing through it.
For generating linear motion, the electromagnet is paired with a movable iron core attached to the object that needs to be moved. When electrical current flows through the electromagnet’s coil, it magnetizes the core, creating an attractive magnetic force that pulls the movable core toward it. By switching the electromagnet on and off, the core moves back and forth in a linear motion. This mechanism is utilized in linear actuators and relays.
For producing rotational motion, the electromagnet acts on a rotor containing iron surfaces. The magnetic attraction and release between the energized electromagnet and rotor iron causes the rotor to spin. In a brushed DC motor, the electromagnets are mounted on the stator while the rotor contains permanent magnets. By energizing the electromagnet poles in a sequence, a rotating magnetic field is generated which drives the rotor continuously. In brushless DC motors, electromagnets are on both the stator and rotor.
With the ability to precisely control the magnetic fields by adjusting electrical current, electromagnets can generate controlled and repeatable motion for a wide range of applications.
Comparisons
When comparing different technologies that convert electrical energy to kinetic energy, there are a few key factors to consider:
Effectiveness – How effective is the conversion process? Some technologies like piezo actuators and electroactive polymers can convert electrical energy into motion very efficiently with minimal losses. Others like solenoids and electromagnets have more electrical resistance resulting in wasted heat.
Efficiency – What is the overall energy efficiency from electricity to kinetic motion? Shape memory alloys tend to have lower efficiency as significant energy is lost during their phase change process. Linear actuators can be highly efficient at up to 90% conversion.
Force/Torque – How much force or torque can be generated? Electromagnets can generate extremely high levels of force from small amounts of input electricity. Piezo actuators generate lower levels of force but have very fast response times.
Speed – What speeds can be achieved? Piezo actuators can operate at very high frequencies up to tens of kHz. Solenoids and linear actuators have slower mechanical responses.
Scale – What size scales are practical? Shape memory alloys only generate small displacements but can be fabricated at micro-scales. Electric motors have a wide range of sizes from micro to large industrial.
Complexity – How complex is the design and control? Simple actuators like solenoids and linear actuators can operate open loop. But motors require more complex controllers for closed loop speed/position control.
Applications – Different applications have different requirements. For high force linear motion, solenoids or linear actuators may be suitable. For precision position control, electric motors are effective. For micro-actuators, piezo or shape memory alloys would work.
By evaluating these factors, the most appropriate electrical to kinetic energy conversion technology can be selected based on the specific application needs.
Conclusions
In summary, there are several key devices and principles that allow the conversion of electrical energy into kinetic energy and motion:
Electric Motors operate on the principles of electromagnetism – when current flows through a coil, it generates a magnetic field which interacts with permanent magnets to produce rotational motion.
Linear Actuators utilize motors and mechanical components like screws or gears to convert rotational motion into linear motion.
Solenoids consist of a coil wound around a movable ferromagnetic core – when current flows through the coil, the core moves linearly.
Piezo Actuators use piezoelectric materials that change shape or dimension when voltage is applied, creating motion.
Shape Memory Alloys can shift between different crystal structures and change shape when heated via electrical current.
Electroactive Polymers change size or shape when stimulated by an electric field, producing mechanical deformation.
Electromagnets generate magnetic fields when current flows through a coil, creating forces that can pull or push objects.
Understanding these basic principles and devices allows electrical energy to be converted into the kinetic energy of motion in many useful applications.